International Space Elevator Consortium
August 2024 Newsletter
In this Issue:
Presidents Corner
SE Conference Update
Apex Anchor
Chief Architect’s Corner
Tether Materials
Research Note
Solar System Space Elevators Part 3
Around the Web
Upcoming Events
Contact Us/Support Us
President’s Corner
Simulating the Space Elevator
by Dennis Wright
I spent most of my career doing experiments in nuclear and high-energy physics. In those fields, no experiment is built or, indeed, even funded before it is extensively simulated. Simulation is essential for detector design and aids in data taking and analysis. The same will be true of the space elevator. A thorough understanding of its dynamics, construction, and operation must be obtained before a single ribbon is deployed. Even at the atomic scale, simulations must be performed to understand the properties of large sheets of graphene as they are bonded together to form the tether.
At ISEC, we’ve taken the first steps in developing a suite of simulation software that can address these issues. We’re now working on visualization. The motions of the space elevator can be calculated, producing a stream of data describing the positions and velocities of thousands of points along the length of the tether. Until these can be visualized, though, it is difficult to get an intuitive understanding of what the space elevator will do in various circumstances. Our goal is to have a graphical user interface (GUI) that allows the user to drive the simulation, view it from different aspects, and modify some of its operational parameters. Movies of the tether motions would also be produced, stored, replayed, and analyzed.
Tether dynamics calculation codes predict space elevator motions and allow them to be compared to data and to the predictions of other codes. Several of these will be made available as part of the ISEC simulator. One such code already in use is a modification of the GTOSS code which NASA used to predict tether motion in experiments flown on the space shuttle. Another dynamics code is in development and ISEC invites other authors to contribute their dynamics codes as well.
Simulation will also be required during space elevator operations. In this case, digital twin technology will be used, and motion predictions made by mathematical space elevator models will be directly compared to telemetry from the deployed tether. If the actual tether motion departs from theoretical expectations, the size of the deviations can be used to automatically correct the tether motions using actuators on the tether. Conversely, actual tether motions can inform the theoretical models so that they may be improved. Such patterns, of course, could be learned by artificial intelligence, which in turn could control the entire operation.
So far, we’ve discussed simulations at macroscopic scales, but much needs to be learned at the atomic scale. Even as sheets of graphene start to be produced, it will be necessary to understand at a basic level how such sheets can be bound together to form the tether, how to increase their surface friction, and how to increase their shear strength by cross-bonding. All this can be done by simulation in the modeling of macromolecules. Molecular dynamics codes can predict the behavior of macromolecules as atoms are removed, added, or bonded.
Simulation will also be on the agenda at the ISEC conference in Chicago this September. We’re planning a workshop on tether deployment. With recent results from dynamics calculations and new deployment methods to be discussed, this should be very interesting.
Why don’t you join us? See our web page (www.isec.org/events/isec2024) to get details.
As you can see, much needs to be done, and expertise in various types of simulation and display software is required. We’ve just begun this project and invite you to join us in this multi-year effort. Do you have any questions or just want to talk? Contact me at dennis.wright@isec.org.
2024 SPACE ELEVATOR CONFERENCE!
Last Chance to Sign Up!
The International Space Elevator Consortium will hold its annual, in-person conference in Chicago on Saturday, September 7th, and Sunday, September 8th.
Among other topics, we will be discussing the use of graphene for the space elevator tether, space elevator missions and functionality, and simulation and visualization of the space elevator.
Join us to listen to the top voices in the Space Elevator community and to offer your input in our breakout sessions.
Location: Aon building in downtown Chicago
Please check our events page for more information.
Registration fee:
Regular Conference price: $275 US per person (student and speaker discounts available)
Included in the fee:
+ Continental breakfast both days
+ Lunch both days
+ Engaging presentations about Space Elevators
+ Opportunity to engage in small break-out workshops
Accommodations:
+We are very excited to offer a hotel rate of $249 per night at the Fairmont Chicago. Don’t delay; make your reservations by Friday, August 16 to reserve this rate!
+The hotel link is included on the payment confirmation page and in the payment confirmation email.
Be a part of history and join us as we contemplate reaching space!
If you have any questions, please contact Karyn.Gleeson@ISEC.org, Conference Co Chair.
Apex Anchor: Full-Service Logistics Transportation Node
by Paul Phister, Ph.D.
The most recent ISEC Research Study Report is being released during August, prior to the ISEC Conference. The team pulled together a great report showing what can be possible after a robust “build-out” towards full operational capacity. It is available now on the ISEC website under study reports, https://www.isec.org/studies.
Once the Modern-Day Space Elevator development program emerged in 2020, the concept of an active transportation node at the Apex Anchor became obvious. The enhancement of the roles at an Apex Anchor showed how it will become a Full-Service Transportation Node focused around the “Logistics Center at the top of the Gravity Well.” The inherent rapid release velocity (7.76 km/sec) at an Apex Anchor -- and the ability to release every day of the year towards any destination, such as the Moon, Mars, and even Pluto -- opens up the universe to humanity. These capabilities at the Full-Service Transportation Node led to the enabling of missions such as:
+ A release point for interplanetary science missions and space systems of any size (assembled at the top of the gravity well) to any planet with daily windows.
+ Interplanetary human missions (after development to Full Operational Capability) with space systems of any size to any planet with daily windows.
+ Interplanetary full-service logistics, storage, and resupply capability with “just-in-time delivery.”
+ Astronaut Rescue staging area with storage of necessary rescue materials such as oxygen, habitats, water, rocket fuel, power, and food. (only 14 hours from the Moon)
+ Planetary Defense early asteroid detection sensors on multiple 100,000 km tethers on each side of the Earth (206,000 km baseline) for stereoscopic vision will warn of incoming asteroids from the Sun or out of the asteroid belts. In addition, the storage of planetary defense spacecraft will enable rapid response to near-term threats within 24 hours. Responses can be flexible by storing and rapidly assembling various defensive segments of planetary protection space systems, depending upon the threats.

As shown during this research, with the addition of Full-Service Transportation Nodes at Space Elevators’ Apex Anchors, Space Elevators will position humanity to address Earth’s challenges from a new vantage point. We are on the brink of transforming our relationship with space, offering an eco-friendly, cost-effective, and efficient logistics method to transport large cargoes into space. This spaceport will provide unparalleled opportunities in space exploration, resource utilization, and satellite assembly. Starting in the late 2030s, Space Elevator infrastructures will deliver satellites and other payloads to GEO, the Moon, and Mars at the rate of 30,000 tonnes every year.
Chief Architect’s Corner
by Pete Swan
Role of Chief Architect and Thanks to “Fitzer”
I have looked over Google’s definition of Chief Architect, Head Architect, and Chief Systems Architect and have chosen what I believe (after 56 years in the space development game) should be the responsibilities of an ISEC Chief Architect. However, to put it in perspective, Dr. Rechtin, in his book Systems Architecting, recognized that over time “… great architectures required creative individuals capable of understanding and resolving problems of almost overwhelming complexity.”1 He saw that it would become “…both a science and an art. The former is analysis-based, factual, logical, and deductive. The latter is synthesis-based, intuitive, judgmental, and inductive.” I propose we go with the following definition until we develop a better one. The goal of the Chief Architect should be:
Enable a Space Elevator through cross-arena insight!
Chief Architect’s responsibilities within ISEC2
+ Identification of customers, clients, and stakeholders
+ Define needs to be fulfilled by a space elevator
+ Establishment of a systems vision
+ Identification of engineering potential
+ Recognition of “showstoppers” -- both engineering and social
+ Refinement of initial solutions
+ Merge reality and dreams
+ Development of architectures
As I see it, we have a very good vision at this time – but we need to go one step further with some “thrusts” to focus our research and move towards a robust future with Space Elevators [more later on this one.] Client relationships with respect to ISEC as an association supporting the industry have been initiated -- but they need to be more robust. We support the large missions of settlements on Mars, Space Solar Power, and so many other dreams, but ISEC needs to expand within the vast space community. Near-term objectives and long-term goals have been around for years; they need to be brought out in the open and discussed and formalized in the near future. With Dennis and Larry as our leaders, this should be expanded and articulated in the near to mid-term. We have not reached a formal design or production research; nonetheless, we have done a marvelous job of setting up so many concepts for all the segments of Space Elevators. Each of the 14 yearly research studies have accomplished much in its area of study. As we approach design and testing, we will need ISEC to investigate which direction should be taken, leading to recommendations for developers.
Now, I would like to thank Michael Fitzgerald “Fitzer” for his comprehensive work and beautiful focus on the concept that Space Elevators are permanent space access infrastructures:
First, he worked with Vern Hall, who initiated the thinking of Earth Port and Galactic Harbours (with Fitzer), leading to the concept we have now of two Space Elevators within Galactic Harbours as a commercial venture. This defining of the lower portion of the Space Elevator empowered the belief that we can do this and make it as a transportation entity. This concept is key to the future vision of where development is going. This initial look at a full architectural view is critical to the assembly of the segments and a good vision of future operational and commercial demands. The vision of Space Elevators as commercial train tracks and truck stops opens up the future Green Road to Space with easy-to-understand concepts…it’s a bridge to Space!
Secondly, Fitzer saw his role as the ISEC Architect as one of leading thinking for a future of robust commercial usage as well as opening up the dreams of so many. He loved going to the National Space Society’s International Space Development Conferences as he could talk to the students of today who will be using space elevators in the future. His vision was always the Green train track to GEO and beyond. His own page of Architect's Notes on our website is a marvelous look at our progress over the last ten years of “thinking big” and aggressively while understanding the steps of how to get there. I will be starting my own Architecture Notes as a continuation of his 40+ insights as a tribute to him and a way to reach space elevator enthusiasts.
Thanks Fitzer -- we miss you already!
Note: The Modern-Day Space Elevator Body of Knowledge is at www.isec.org in addition to the Architect’s Notes.
References:
1. Rechtin, Eberhardt, Systems Architecting, Prentice Hall, Englewood Cliffs, NJ 1991.
2. Swan, P, C. Swan, “Space Elevator Systems Architecture,” lulu.com, 2007.
Tether Materials
by Adrian Nixon
Using artificial intelligence (AI) to calculate how big would be a reel of one layer of space elevator tether material
An ISEC study group led by Jerry Eddy is working on the deployment methods for the space elevator. Understanding how big a reel of one layer of tether would be is an important factor in this planning.

Fig 1. Graphic impression of a reel of tether material. Image generated by an AI with additional content by A. Nixon
I had previously quoted a value of 300mm diameter for a 1-metre-wide reel of graphene tether wrapped round a 20mm core. Jerry asked me to double check the calculation using the latest technical information we have about graphene super laminate (GSL). Other colleagues suggested I try using some of the new artificial intelligence (AI) tools that are available on the web.
The experience has been enlightening in ways we could not have predicted...
First, we need to frame the question we are asking...we start by assuming the material is single crystal graphene. In the ISEC study groups we have been using a ‘standard tether’ for our test calculations: a continuous piece of material of 1 metre constant width, 100 million metres long. We know the density of graphene is 0.77milligrams per square metre. This means the mass of one layer of tether is 77kg. We also know that the effective layer thickness of graphene is 0.34 nanometres.
We identified three prominent large language model (LLM) artificial intelligence models: GPT4, Perplexity and Google Gemini. The question put to these selected AIs was:
“What is the diameter of a cylindrical roll of graphene with a layer thickness of 0.34 nanometres, 100 million metres long, one metre wide wrapped round a 20mm core.”
And we received different answers:

The real answer should be 0.209 metres (209 mm or just over 8 inches in diameter.)
These spurious answers prompted quite a debate with my ISEC colleagues, and we concluded that these models had produced incorrect answers because their training did not include exposure to this type of problem. Also, the nature of artificial intelligence is that it is a ‘black box’ and we cannot know how it is creating the responses it produces.
My colleague, Chris Bentley, summed this up nicely “LLM foundation models aren't geared up at all for mathematical computation as such. What they do is to produce a probability distribution for the next token in a sequence, based on a 'context', which is a large string of previous tokens. They then sample from this distribution.”
And that would have been the end of the story, except that in preparing these newsletters we try to be as thorough as we can, and I re-ran the queries to the AIs as a double check.
I received a surprise. Two of these AIs now got very close to the right answer!

Somehow GPT4 and Perplexity had ‘learned’ about the error of their result and had corrected this. Gemini had not.
At ISEC, we discussed this issue by email and with Teams. We did not intend to put this work in the public domain until it was published in this newsletter which you will read from early August 2024.
This raises fascinating questions:
+How did these models know they were incorrect?
+How did they create the corrected results?
+Do these LLMs exchange information with one another?
Dear Reader, I must leave you to ponder these questions, the nature of this technology is such that it is opaque to all users. However, there is clearly more going on here than we realise.
Research note
by John Knapman
Recent newsletters have looked at building as far as 1000km in the three orthogonal directions from the geosynchronous altitude (GEO). We can also build further along the tether towards Earth. For example, we may want to build a hotel nearer to Earth so that people can travel there in less time than the week it takes to reach GEO. Again, a balance must be maintained; building below GEO (nearer Earth) requires something to be built higher (away from Earth). The extra tether to support the hotel (or other structure) can be separate from the primary tether so that it is easy for climbers to pass through when traveling to GEO or beyond.

Figure 1 A hotel near the Earth with a balancing weight at the other end
When the distances exceed a thousand kilometres or so, we need to taper the extra tether just like the primary tether so that the higher parts are thicker than the lower parts and are therefore strong enough to support them. The nearer to Earth the hotel, the greater the combined mass of the tether or tethers will need to be. The calculation is most easily done with a spreadsheet. The results are in Table 1.

Table 1 Tether and apex anchor mass requirements (tonnes) for a 1000t structure
As you can see, it takes seven days to reach GEO at 35,786km. The gravity is practically zero. The masses of the tether and apex anchor are 2730t (tonnes or metric tons) and 1364t respectively. At GEO, the 1000t hotel places no load on the tether. After three days journey from Earth, the gravity is only 13% of Earth gravity. A hotel there requires tether and apex-anchor masses of 6560t and 3422t, which is an increase of 3830t and 2058t respectively. A guest there would be able to jump six times higher than on Earth.
A hotel at only one day’s journey is feasible, though expensive, as the tether to support it is more than ten times as massive as is needed for a structure at GEO. Guests may be disappointed to find that gravity is only one third less than it is on Earth. On the other hand, being able to reach it in only one day would probably be a draw. The big advantage will be that the journey on a space elevator is gentle and will not require astronaut training.
A hotel size of 1000t was chosen as an example. The increases in tether and apex-anchor mass will scale with the size of the structure. For comparison, a cruise ship carries about 30 passengers plus crew per 1000t; at the time of writing there are 11 people on the international space station, which has a mass of 420t.
Solar System Space Elevators
by Peter Robinson
Part 3: The Moon (Luna)
This is the third article of a series based on the “Solar System Space Elevators” presentation given at a British Interplanetary Society Space Elevator Symposium in 2017.
Parts one and two of this series covered Mercury, Venus, and the Asteroids: here I discuss Space Elevators on Earth’s Moon (Luna).
Some important background is an explanation of the two distinct types of Space Elevator, the ‘Centrifugal’ and ‘L1-Type’, each consisting of a tether attached to a planetary body and a counterweight (Apex Anchor).
- The ‘Centrifugal Elevator’ could be built on any rotating body (such as the Earth), with the tether simply held in tension by centrifugal force acting on the Apex Anchor.
- The ‘L1-Type Elevator’ could be built on any tidally-locked moon (such those of the Earth or the Gas Giants) with the tether extending from the moon surface beyond the L1 point [1] towards the parent planet, with an Apex Anchor on the planet side of L1. At the Apex the planet’s gravity exceeds that of the moon, keeping the tether in tension.
- An elevator is also feasible on a tidally-locked moon extending through the more-distant L2 point, but this is supported by centrifugal force and so can simply be classified as a ‘Centrifugal Elevator’.
Wikipedia contains an entire page on ‘Lunar Space Elevators’ [2]: I will not duplicate that content here but will describe some published concepts, the results of my own analysis, my conclusions and my opinion on the concept feasibility.
1. CONCEPTS
The Lunar Space Elevator (LSE) was first described by James Cline in 1972 [3], followed by more detailed papers by Jerome Pearson in 1976 [4] and for NASA in 2005 [5], and by others. The schematic below is a simple representation of the concept.
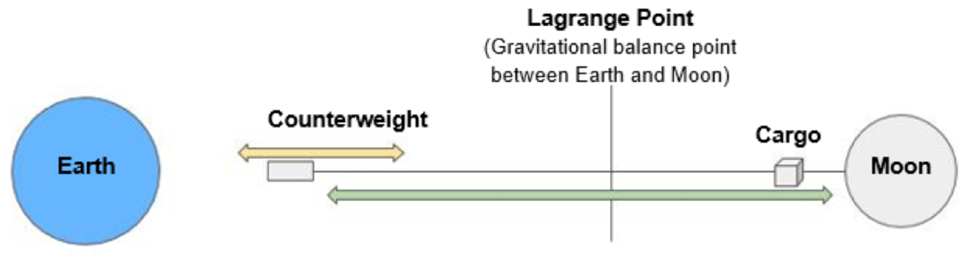
Figure 1: Lunar Elevator Schematic, credit LiftPort Group
In 2011 Michael Laine’s LiftPort Group changed their emphasis from Earth to Lunar Space Elevator systems, with much detail on their website [6] including the schematics above and below.

Figure 2: ‘CisLunar Econosphere’, showing Lunar Elevator to scale with transfer orbits, etc. Credit LiftPort Group
In 2016 Eubanks and Radley of ‘Asteroid Initiatives’ published a paper describing a deployment scenario and the potential scientific return from an LSE [7].
In 2019 Sandford and Penoyre published a paper in Acta Astronautica [8] with discussion of tether materials and taper options, plus much more.
In 2020 Astrostrom Gmbh [9] published a major study on Space Based Solar Power (SBSP), including a proposal to use an LSE to raise processed lunar regolith to build SBSP systems in GEO orbit.
2. ANALYSIS
Many of the concepts above described an LSE tether over 250,000 km, but with little explanation as to why a length so much greater than 56,315km (the mean altitude of the Earth-Moon L1 point) was chosen. To investigate this further (and to derive some estimate of the relationship between lift capacity and total system mass) I undertook analysis using a simple numeric (spreadsheet) technique as described in my 2022 IAC paper [10].
All the recent LSE papers had described the potential to use an existing tether material, with several suggesting Zylon. I built my model using data for this material with a reduction in cross-sectional area at low lunar altitudes to maximise lift capacity from the lunar surface: for simplicity of analysis I did not build a constantly-varying taper into the model, electing instead to use an area of 4 mm^2 below 1000 km, rising to 6 mm^2 from 1000 to 2500 km and to 10 mm^2 for all altitudes above 2500 km. This tether could be stressed to provide a tension adequate to support a 4-tonne climber accelerating at 0.25g from the Moon’s surface, representing a nominal useful lift capacity. Tether sizing and lift capacity could of course be scaled as required.
Details on Zylon can be found in Wikipedia [11] and elsewhere. Many applications are described, notably in F1 cars, as parachute cords on SpaceX Crew-Dragon spacecraft, and as the ‘house tether’ in the 2007 ‘Spaceward Games’ Space Elevator tether strength competition. There is mention of limited longevity in some applications, deterioration due to UV exposure and a limited working temperature range. Manufacturing techniques of Zylon as a wide ultra-thin ribbon (as required for climber traction) are also unknown, so no estimate can be made as to the feasible construction speed for large-scale tethers: at 1 m/sec it would take 6.34 years to manufacture a 200,000km length on a single facility.
The spreadsheet model yielded tether and counterweight (Apex Anchor) masses for all altitudes above the L1 point. Figure 3 below plots this data and explains why earlier studies had selected tether lengths above 200,000 km.

Figure 3: Tether and Counterweight (CW) masses v Altitude (P. Robinson analysis)
It can be seen that a high CW mass is required even at double the L1 altitude. Further explanation of this can be found by considering the effective gravity along the tether (this being the gravity force from the Earth less the gravity from the Moon and less the outward centrifugal force from the 29-day rotation around the Earth) shown in Figure 4 below.

Figure 4: Effective Gravity between Moon and Earth, linear scale. P. Robinson analysis.
This plot shows effective gravity rapidly falling from the 1/6 g at the lunar surface, eventually rising to the nominal 1g at the Earth’s surface. Unfortunately, the scale of this plot has insufficient detail as the net gravity value is close to zero for much of the distance. Figure 5 below resolves this by using a log scale for the effective gravity, with an absolute value to yield data above and below L1.

Figure 5: Absolute Effective Gravity between Moon and Earth, log scale. P. Robinson analysis.
This plot perhaps explains the need for such a long LSE tether, with the effective ‘pull’ towards the Earth being below 0.001g up to altitudes of c 200,000km. This results in the very high Apex Anchor mass requirement to counter the tether tension force (= 28.3 kN in my model).
As mentioned earlier, this simple analysis did not incorporate any tether ‘taper’, and so yields tether and CW masses higher than could be achieved with a full (complex) taper. Pro rata comparison with results from earlier studies (notably [8]) suggests that the difference is less than a factor of two. It is not certain if a tapered tether would be more complex to manufacture.
3. CONCLUSIONS
3.1 Lift Capacity
The above analysis suggests that the ratio of the total system mass (tether + counterweight) to the gross climber mass is at least 500 to one. The tether might support two climber launches in each 24-hour period, depending on climb velocity and other factors, but the useful payload of each climber will be less than the gross mass. Thus, the useful payload each 24-hr period could be of the order of .001% of the total LSE system mass.
Some studies have assumed that climbers would travel to the Apex for a release to a lower Earth orbit, other have assumed that climbers would stop at some outpost at the L1 point. In either case the climber ‘payload’ would need to include a spacecraft chassis to transport cargo to its final destination, further reducing the net payload mass.
If the climber payload does need to include a powered spacecraft to carry payload to some final destination the maxim ‘the best part is no part’ might be applicable: the low lunar gravity and lack of atmosphere means that a rocket-powered craft could be launched direct from the lunar surface, eliminating the need for the massive and costly ‘part’ that is the entire LSE system. Extra components and fuel would of course be required for launching direct from the lunar surface, but these must be offset against the 1000x mass of the LSE tether and counterweight.
Climber manufacturing and cost is another issue, given that multiple daily launches will mean a regular supply of climbers will be needed. For an Earth Elevator, the climbers might be built alongside other electric vehicles on Earth, making use of some of the same supply chain and facilities to minimise the climber cost. On the Moon, there will be no such supply chain or factory, meaning either components or the climbers themselves will need to be shipped from the Earth. This would further increase the cost of the climbers, making the cost/kg of raising material from the lunar surface even less competitive with launches by rocket or other means (such as mass drivers).
3.2 Climber Design, Durability and the Climber/Tether Interface
The published studies have included few design details for the climbers: some have mentioned that they would be solar-powered, but details of the interface with the tether have not been described. A solar power source would mean the ascent near the lunar surface must be during the lunar day, further reducing the system lift capacity.
It is possible that climbers could return to the lunar surface during the lunar night, but logistics might be difficult as the ascent or descent from the lunar surface to L1 (56315 km) is likely to take over a week, perhaps almost 12 days at an optimistic 200 km/hr climb speed.
Solar power is not the only option. The conclusions of the ongoing ISEC Study on powering Earth Elevator climbers may be applicable.
Some of the conclusions from the recent ISEC Climber/Tether Interface study [13] may also be relevant to LSE climbers, though there must be additional concern as a weaker tether material may be damaged from clamped metal drive wheels operating at high speeds. A further consideration is climber durability: achieving non-stop high-speed operation for 56000+ km will take considerable engineering effort. Extending this further to the Apex at 200,000+km will be even more challenging. Wheel fatigue is one potential issue, especially if the climbers were also required to return to the lunar surface, although clamping loads will be low for much of the journey.
4. SUMMARY
The Lunar Space Elevator appears to be feasible, as described in the many published papers, but I suggest that it may not be technically or commercially viable, at least shorter-term with an ‘existing’ composite tether material and the issues discussed above.
Longer term, availability of a stronger ‘Earth Elevator’ tether material such as Graphene Super Laminate (GSL) would enable more massive payloads to be raised (perhaps 10x) from the lunar surface. There would also be considerable synergy with other Earth Elevator technologies, such as climber design and dynamic control, but the Earth Elevator would surely remain the higher-value primary system for construction given the likely launch demand and greater difficulties in escaping the Earth’s gravity well.
The above represents my personal views, I am sure the Newsletter Editor would welcome articles from Lunar Elevator advocates to counter my more negative arguments. Send your response to newsletters@isec.org.
Next Time: Mars!
Peter Robinson
5. REFERENCES
[1] Wikipedia ‘Lagrange Point’: https://en.wikipedia.org/wiki/Lagrange_point
[2] Wikipedia ‘Lunar Space Elevator’ https://en.wikipedia.org/wiki/Lunar_space_elevator
[3] “The Mooncable: A Profitable Space Transportation System”, James Cline, 1972: https://www.scribd.com/document/14803146/The-Mooncable-A-Profitable-Space-Transportation-System-Original
[4] “Anchored Lunar Satellites for Cislunar Transportation and Communication”: Jerome Pearson, The Journal of the Astronautical Sciences, Vol. XXVII, No. 1, pp. 3962, January-March, 1979: https://www.researchgate.net/publication/260619190_Anchored_Lunar_Satellites_for_Cislunar_Transportation_and_Communication1
[5] "Lunar space elevators for cislunar space development", Jerome Pearson, NASA NIAC Phase I Final Technical Report, under NASA Grant #07605-003-034, 2 May 2005: http://www.niac.usra.edu/files/studies/final_report/1032Pearson.pdf
[6] LiftPort website https://www.liftport.com/lunar-elevator.html
[7] “Scientific Return of a Lunar Elevator, Space Policy”, Marshall T. Eubanks, Charles F. Radley (‘Asteroid Initiatives’, 2016), https://arxiv.org/pdf/1609.00709.pdf
[8] “The Spaceline: a practical space elevator alternative achievable with current technology”, E. Sandford & Z. Penoyre: https://arxiv.org/abs/1908.09339
[9] “The Lunar Space Elevator: A Key Technology for Realising the Greater Earth Lunar Power Station”, A. Woods, A Vogler, P Collins (Astrostrom GmbH: https://astrostrom.ch/ ), JBIS Vol 76 No.7 July 2023: https://astrostrom.ch/docs/http://JBIS-6-Lunar-Space-Elevator.pdf
[10] “Space Elevator Climber Dynamics Analysis and Climb Frequency Optimisation.”, P. Robinson, IAC2022 paper IAC-22,D4,3,8,x68299: https://www.isec.org/s/ISEC-2022-IAC-space-elevator-climber-dynamics-paper.pdf
[11] Zylon Wikipedia page: https://en.wikipedia.org/wiki/Zylon
[12] “The Space Elevator Payload Journey Beyond GEO: Climber Concept and Options.”, P. Robinson, IAC2023 paper IAC-23,D4,3,11,x76283: https://www.isec.org/s/ISEC-2023-IAC-space-elevator-payloads-beyond-GEO-paper.pdf
[13] ISEC Study “The Climber-Tether Interface of the Space Elevator”, D. Wright et al, https://www.isec.org/studies/#ClimberTetherInterface
Around the Web
Jonathan Schramm makes some bold predictions for the future in his article, “Space Infrastructure – Building Stairways to the Heavens.” https://www.securities.io/space-infrastructure/. In it, he mentions the role that space elevators might play and even uses one of our graphics and a link to the Space Elevator 101 YouTube video.
Upcoming Events
8th Annual Nanotechnology Conference
Sponsored by the Royal Society of Chemistry
https://www.rsc.org/events/detail/77700/8th-annual-nanotechnology-conference-nanomat2024
Sunday, August 25th, through Wednesday, August 28th, 2024
Hotel Arcotel Wimberger, Vienna, Austria
Space Elevator Conference
Sponsored by the International Space Elevator Consortium and Slalom, Inc.
https://www.isec.org/events/isec2024
Saturday, September 7th, through Sunday, September 8th, 2024
Downtown Chicago, Illinois, USA
75th International Astronautical Congress
Sponsored by the International Astronautical Federation (IAF)
https://www.iafastro.org/events/iac/international-astronautical-congress-2024/
Theme: “Responsible Space for Sustainability”
Monday, October 14th, through Friday, October 18th, 2024
Milan, Italy
21st Reinventing Space Conference
Sponsored by the British Interplanetary Society
https://www.bis-space.com/reinventingspace/
Theme: “The Commercial Revolution”
Monday, November 11th, through Wednesday, November 13, 2024
Royal Aeronautical Society, London, England
Xploration Conference and Expo
Sponsored by Spaceport Norway
https://www.spaceport-norway.no/
Tuesday, November 12th, through Wednesday, November 13th, 2024
Oslo Event Hub, Oslo, Norway
IPSPACE 2024
https://iaaspace.org/event/international-symposium-on-the-peaceful-use-of-space-technology-health-2024/
Theme: Peaceful Use of Space Technology - Health
Tuesday, December 3rd, through Thursday, December 6th, 2024
Hainan, China
International Space Development Conference 2025
Sponsored by the National Space Society
https://www.isec.org/events/isdc2025
https://isdc.nss.org/
Thursday, June 19, through Sunday, June 22, 2025
Space Elevator Session TBD
Rosen Center, Orlando, FL, United States
76th International Astronautical Congress
Sponsored by the International Astronautical Federation (IAF)
Monday, September 29th, through Friday, October 3rd, 2025
International Convention Centre, Sydney, Australia
77th International Astronautical Congress
Sponsored by the International Astronautical Federation (IAF)
https://iac2026antalya.com/
Theme: “The World Needs More Space”
Proposed Dates: October 5th through October 9th, 2026
Antalya, Turkey
Contact Us:
Our website is www.isec.org.
You can find us on Facebook, X, Flickr, LinkedIn, Instagram, YouTube, Mastodon and Threads.
Support us:
Sign up to be a member at: https://www.isec.org/membership
You can also give directly using the “Donate” link at the bottom of our website page.
Does your place of employment do matching funds for donations or volunteer time through Benevity? If so, you can make ISEC your recipient. Our 501(c)(3) number is 80-0302896.